"
"
Team:Alberta/Project/Automation
From 2009.igem.org
| Line 273: | Line 273: | ||
Therefore, the robot is capable of all the individual operations needed to build synthetic linear constructs on a paramagnetic bead. | Therefore, the robot is capable of all the individual operations needed to build synthetic linear constructs on a paramagnetic bead. | ||
| + | <ul> | ||
| + | <li> | ||
<h2>Complications</h2> | <h2>Complications</h2> | ||
<p> | <p> | ||
Unfortunately the robot is not able to move reliable and reproducibly from well to well consecutively due to limitations in either the Lego Mindstorm motors or the Firmware/Software used. At the moment, it is this complication stands in the way of a working, inexpensive automation tool for use with the BioByte construction method. | Unfortunately the robot is not able to move reliable and reproducibly from well to well consecutively due to limitations in either the Lego Mindstorm motors or the Firmware/Software used. At the moment, it is this complication stands in the way of a working, inexpensive automation tool for use with the BioByte construction method. | ||
</p> | </p> | ||
| - | + | </li> | |
| + | </ul> | ||
Revision as of 00:53, 22 October 2009

 |
|
|
DIY Automation
One of the main themes of this project, as well as iGEM in general, is the simplification of both the parts and the processes of molecular biology. This allows synthetic biology to bring relatively advanced biological techniques 'to the masses'. The Biobytes Assembly is very rigid and reliable; however, it is also very repetitive and tedious. This has triggered us to develop an automated mechanical system (ie. a robot) capable of speeding up and simplifying our methods. The overall goal is that our robot would be simple enough to be used by high school students. This would provide a valuable tool in biological education. It is also our goal to create a system that is versatile enough to be used in more advanced research labs, thereby decreasing the time needed for plasmid construction. |
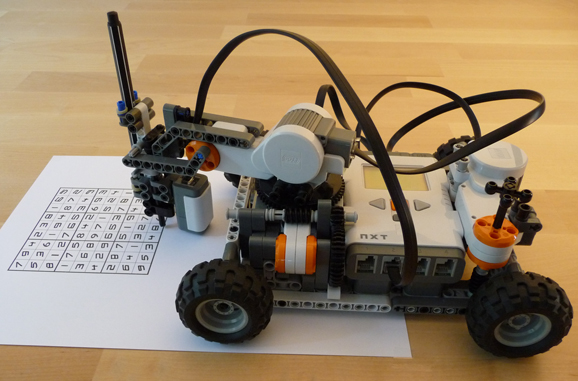
The Robotic DeviceOur robot is built entirely from a single Lego Mindstorms kit, using only the standard pieces and hardware sold with the kit.
|
Hardware and Software
|
CalibrationNo sensors were used in the final design of the robot, therefore the calibration of the robot's movement proved rather time consuming. Due to the fact that the program required all movement calculations to be 'reckoned,' and could not intuitively adjust each consecutive step in the program if preliminary movements had to be changed, many time and distance calculations had to be made and remade to produce to final version of the robot's program. Issues of odometry arose in the calibration of the robot. There appeared to be a problem in either the motors themselves or a firmware/software issue that does not relay any information on the distance travelled by the robot. Due to the 'reckoning' methods involved in programming, it is vital that the robot be able to know how far it has travelled, so that it is capable of returning to previous locations. This is also important so that it can accurately strike the wells and staying within the boundaries of the plate. |
Results
|
Reproducing Our WorkThe source code is a work in progress and therefore has not been posted here. However, the latest, most up to date version is available upon request. The physical setup is also somewhat a work in progress. LCad drawings have not been produced thus far. Should you desire building instructions, high resolution photographs can be taken from multiple angles and sent instead. |