"
"
Team:Alberta/Project/Automation
From 2009.igem.org

 |
|
|
DIY Automation
One of the main themes of this project, as well as iGEM in general, is the simplification of both the parts and the processes of molecular biology. This allows synthetic biology to bring relatively advanced biological techniques 'to the masses'. The Biobytes Assembly is very rigid and reliable; however, it is also very repetitive and tedious. This has triggered us to develop an automated mechanical system (ie. a robot) capable of speeding up and simplifying our methods. The overall goal is that our robot would be simple enough to be used by high school students. This would provide a valuable tool in biological education. It is also our goal to create a system that is versatile enough to be used in more advanced research labs, thereby decreasing the time needed for plasmid construction. |
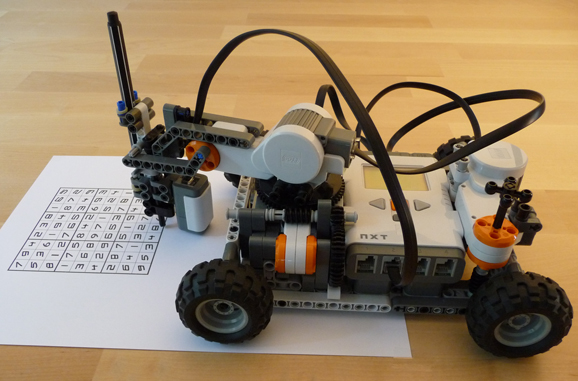
The Robotic DeviceOur robot is built entirely from a single Lego Mindstorms kit, using only the standard pieces and hardware sold with the kit.
|
Hardware and Software
|
Getting to a Working Prototype
|
Results
|
Future Work
|
In the event that you want to build it yourself...
|